Il precedente motore per la piattaforma presente nel plastico aveva cessato di funzionare da molto tempo. L’impossibilità di ripararlo, nonché qualche problema mai risolto, ci hanno fatto pensare di recuperare un progetto da noi seguito e adattarlo alle nostre esigenze.
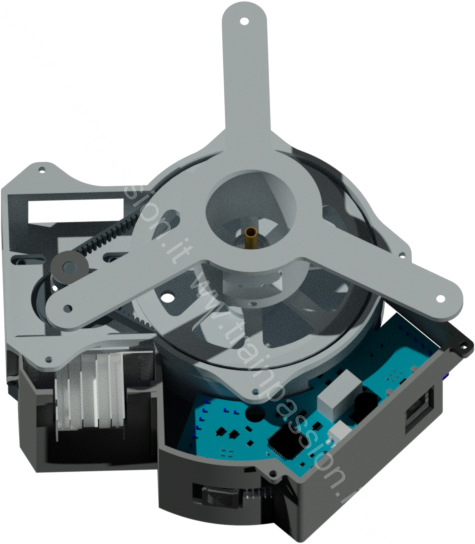
L’elettronica a corredo del driver è in grado di pilotare il motore stepper e di azionarlo sia in modalità analogica che digitale (DCC). Il motore ha una sensibilità di 400 passi a giro che, con la ruota dentata con rapporto 1:7.875 (16/126), realizzano una risoluzione angolare di circa un decimo di grado. La soluzione stepper-cinghia ci ha permesso di eliminare ogni effetto di back-lash.
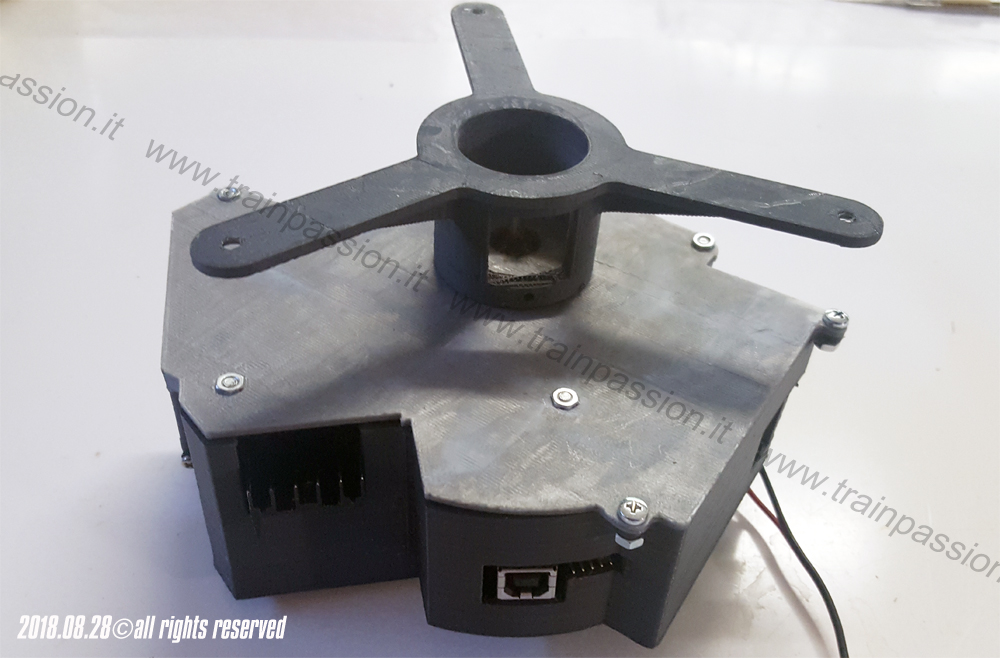
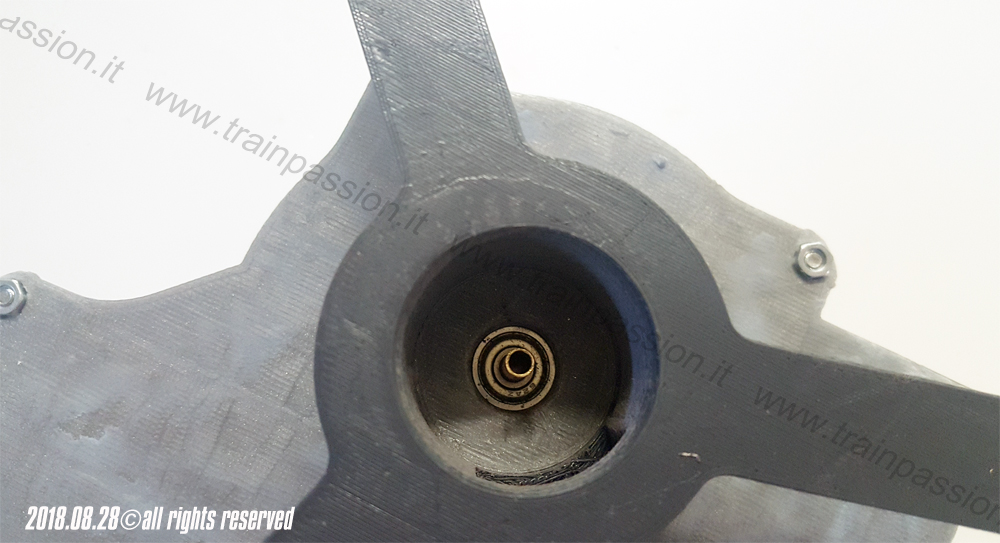
La universalità del driver è stata raggiunta in maniera abbastanza semplice: un coperchio provvisto di cuscinetto a sfere e una staffa di fissaggio.
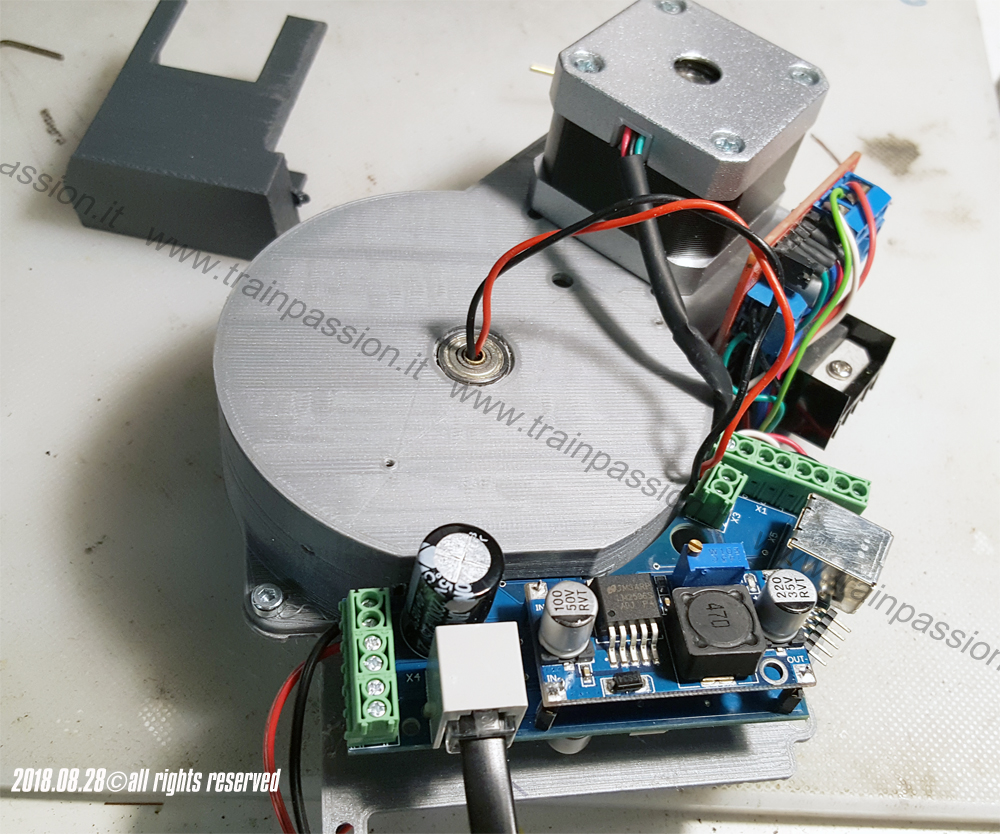
Il motore stepper è fissato con 4 bulloni, ispezionabili per una eventuale ricalibrazione della tensione della cinghia.
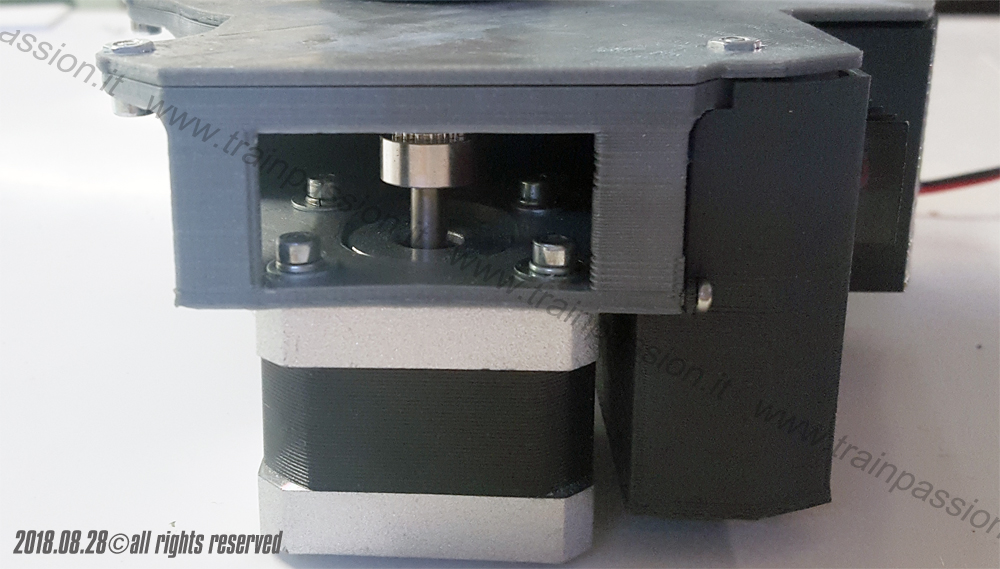
La ruota dentata è resa solidale con un albero cavo con diametro esterno di 4 mm, al quale va fissato un canotto di collegamento con il perno della piattaforma. I cavi di alimentazione delle rotaie del ponte della piattaforma passano agevolmente nel perno cavo e fuoriescono dalla base del driver per essere collegati a relativi morsetti. L’inversione di polarità, nel caso di rotazione di 180° è assicurata dalla logica del dispositivo.
Colleghiamo il ponte con un semplice canotto di raccordo e proviamo la rotazione.
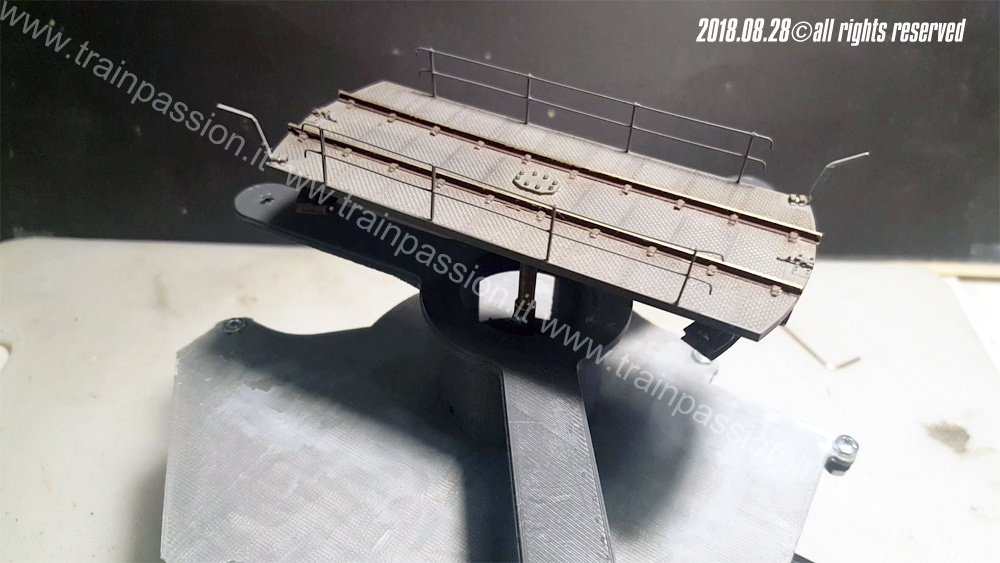
Fissiamo il driver al di sotto della piattaforma, posizionando il ponte in posizione corrispondente al punto dello zero operativo, cioè il punto stabilito per default dal firmware della logica di controllo. Il driver ha infatti un dispositivo di controllo delle posizione realizzato con un magnete di Hall.

Infiliamo il perno cavo del ponte nella ralla della tina, stringiamo i dadi del canotto e colleghiamo i fili del ponte al driver. La piattaforma è ora pronta per il settaggio.

Il driver ha a corredo un tastierino che consente la rotazione del ponte, step by step, verso le posizioni memorizzate, sia in senso orario che antiorario. A parte la posizione dello zero operativo, possono essere memorizzate fino a 8 posizioni. E’ prevista la regolazione fine della posizione stessa. La logica espone 12 funzioni che permettono di manovrare e regolare agevolmente il modello.