Era da qualche tempo che ci si stava pensando…. Il tracciato così come delineato e realizzato permette l’accesso alla futura linea solo dal primo binario di stazione. Sarebbe sufficiente una semplice modifica per rendere possibile l’accesso da tutti i binari, modifica che, fra l’altro, permetterebbe anche una inversione di marcia dai binari di transito tramite la racchetta posta accanto alla rampa di salita alla nuova linea.
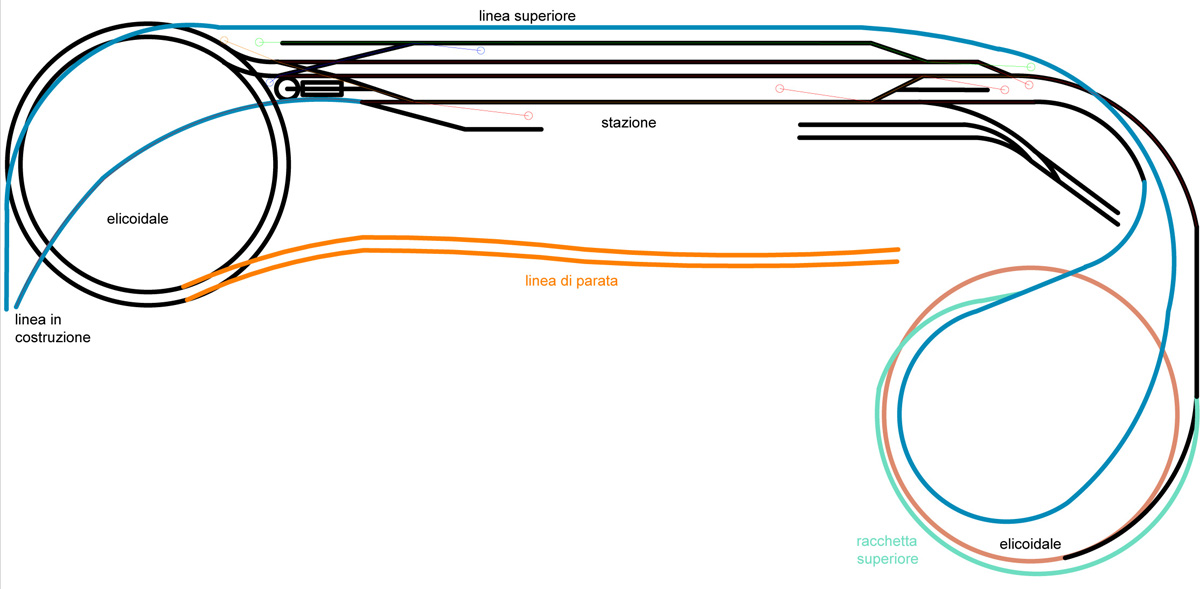
Come evidenziato dallo schema, per permettere l’instradamento verso la linea superiore (in azzurro) e verso la radice sinistra della racchetta superiore (in celeste) dai binari 2,3 e 4 della stazione è sufficiente creare una bretella dalla curva in uscita dalla stazione verso la rampa di salita.
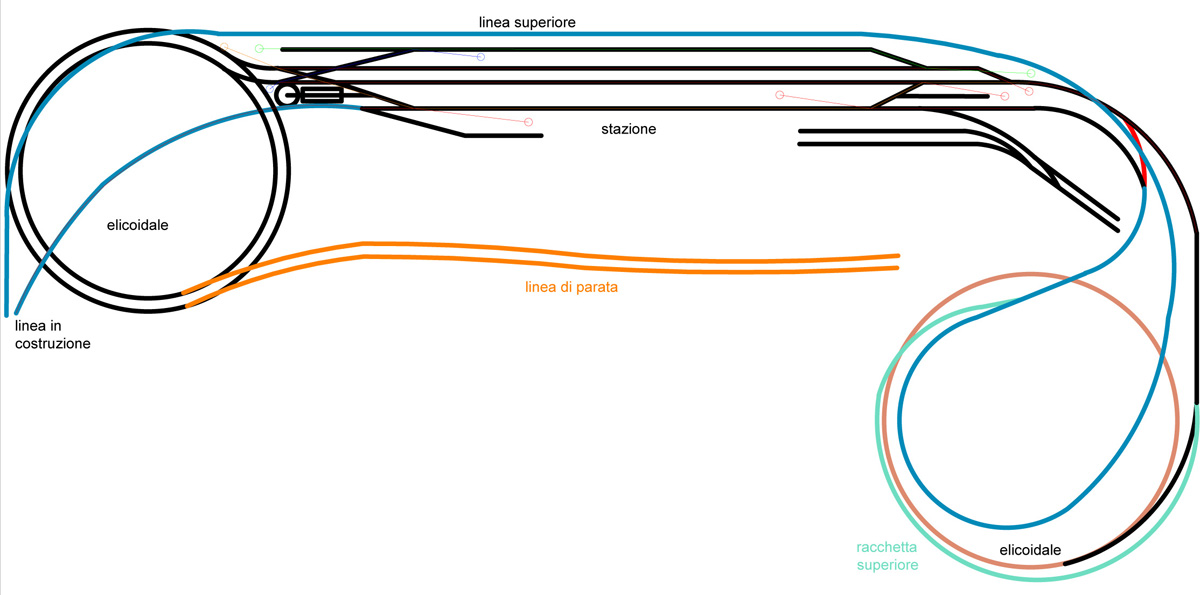
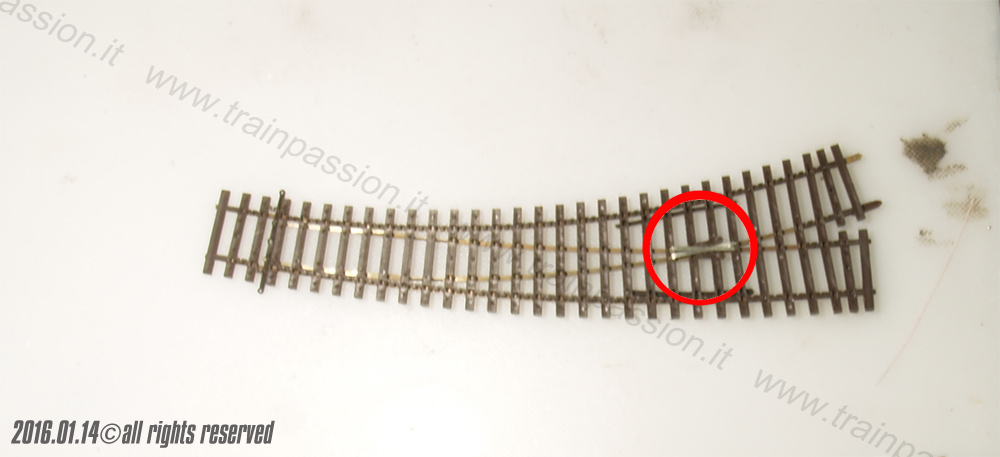
Qui sotto la bretella è evidenziata in rosso.
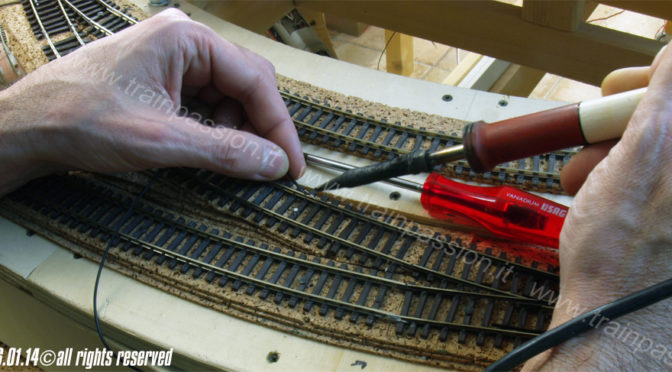
Nell’immagine qui sotto il settore su cui intervenire. Bisogna creare una bretella fra la linea principale, in basso nella foto, e la linea secondaria. I raggi di curvature non sono preoccupanti e l’intervento dovrebbe essere agevole, almeno sulla carta.

I deviatoi scelti (si fa per dire, li avevamo da tempo e per tutt’altri motivi) sono due Tillig curvi, il cui angolo di deviata sembra proprio fare al caso nostro. E anche se l’angolo non fosse proprio preciso possiamo sfruttare la loro elasticità.

Prepariamo uno spezzone di binario flessibile e posizioniamo il tutto per provare se le geometrie corrispondono. In effetti troviamo una corrispondenza fra i raggi di curvatura esistenti e gli angoli di deviata dei Tillig ; pochi adattamenti saranno necessari.

I deviatoi candidati, come del resto anche altre marche propongono, hanno gli aghi connessi al cuore tramite lamelle, intendendo la polarizzazione derivata dal contatto degli aghi con le rotaie. Questa soluzione non ci piace e non ci è mai piaciuta. Avere entrambi gli aghi con la stessa polarità può dar luogo a corto circuiti indesiderati, vista la vicinanza di questi con la rotaia di polarità opposta. Separiamo quindi il cuore dagli aghi tagliando le lamelle e colleghiamo gli aghi alle rispettive rotaie. Il cuore sarà polarizzato direttamente dal motore… e questo lo vedremo fra poco.
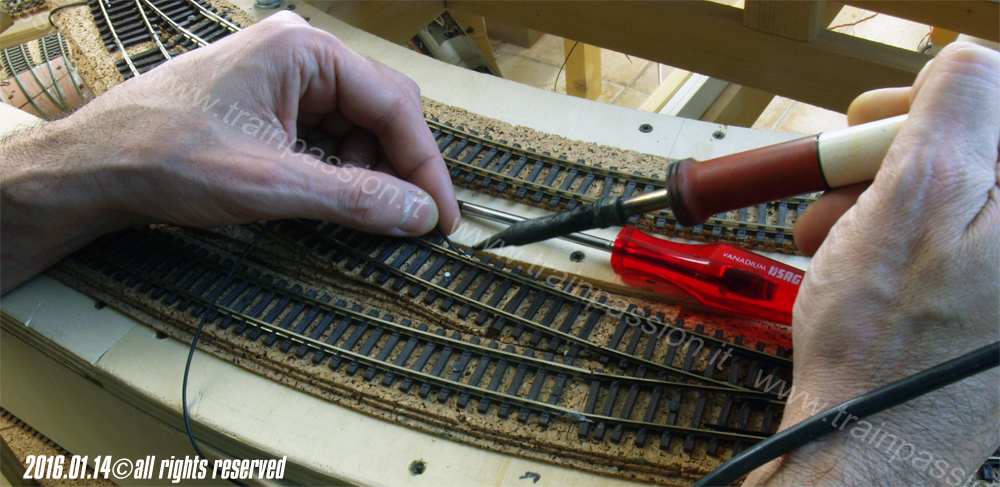
Tagliare e rimuovere rotaie dopo averle sistemate da qualche anno ci mette un po’ di apprensione, ma il lavoro va fatto. Come dicono i saggi, 50 misure e un taglio…

Le misure risultano precise. Fissiamo deviatoi e bretella, ripristiniamo le connessioni elettriche in corrispondenza delle rotaie isolate dalle scarpette in plastica e verifichiamo il tutto con un multimetro. Il lavoro sembra fatto a regola d’arte.
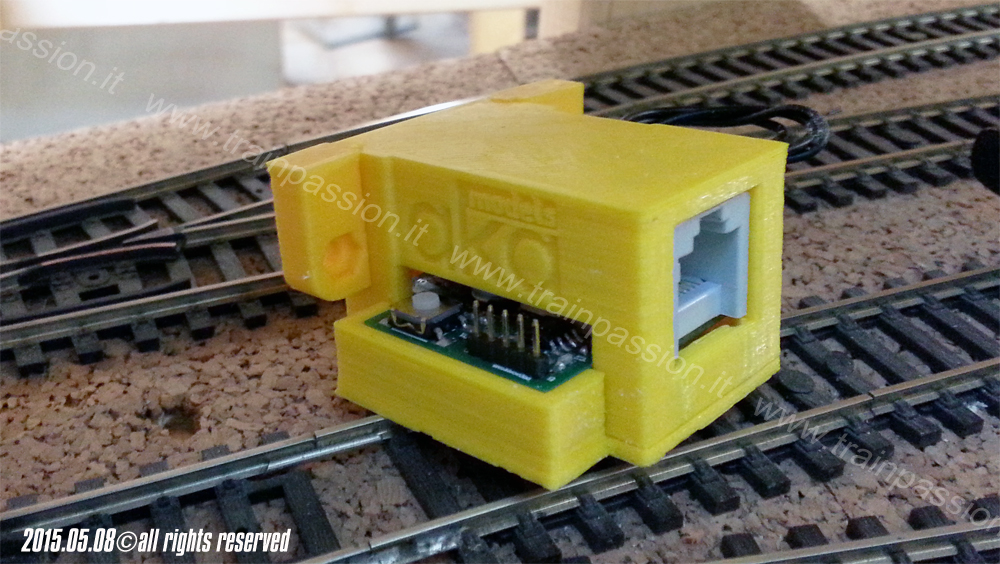
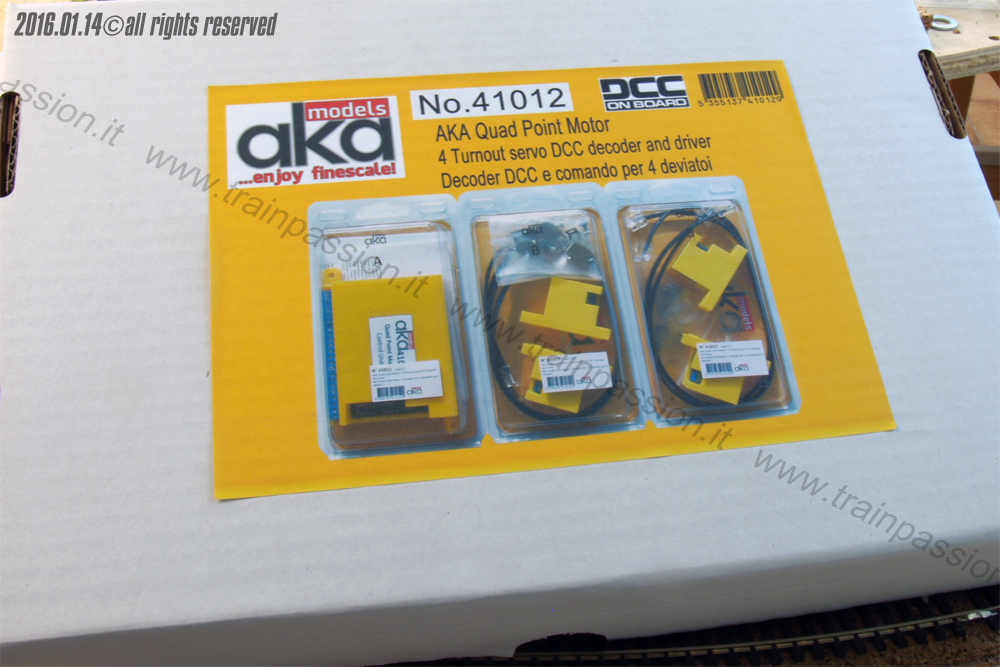
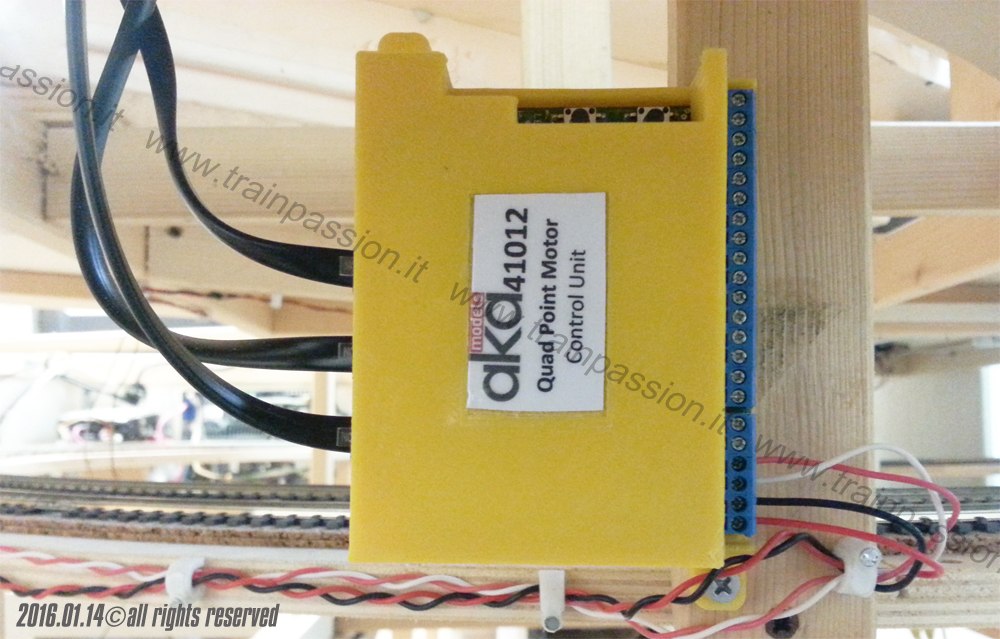
Per la motorizzazione dei deviatoi optiamo per la soluzione progettata per AKA Models. Il kit AKA Quad Point Motor comprende tutto il necessario per motorizzare 4 deviatoi. Il controller ‘anfibio’ lavora sia in analogico che in digitale. A noi interessa la seconda soluzione, quindi le connessioni da fare sono veramente poche: due fili per l’alimentazione e due fili prelevati dal booster DCC. I motori, contenuti in scatole plastiche, si collegano al controller mediante cavi (forniti) recanti spine RJ14 a 6 poli. Gli stessi motori espongono un connettore a vite a cui collegare il filo di polarizzazione dei cuori.
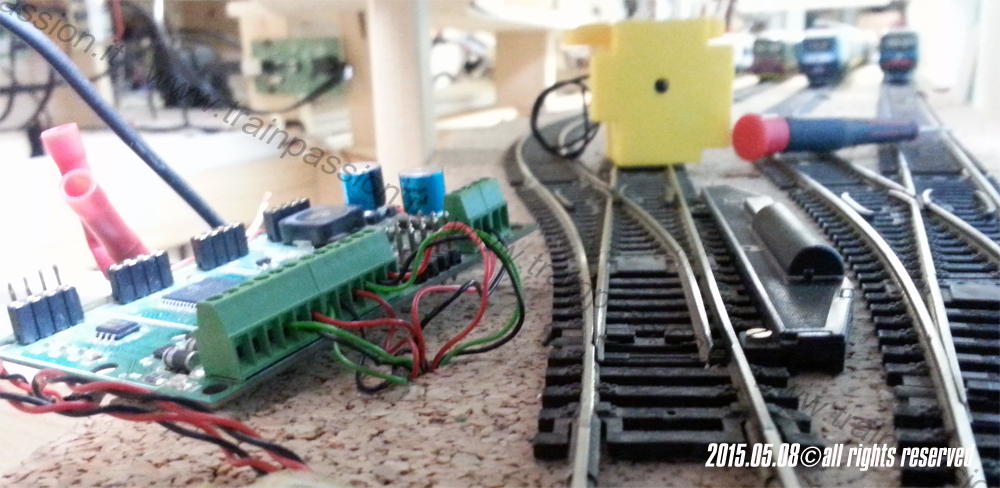
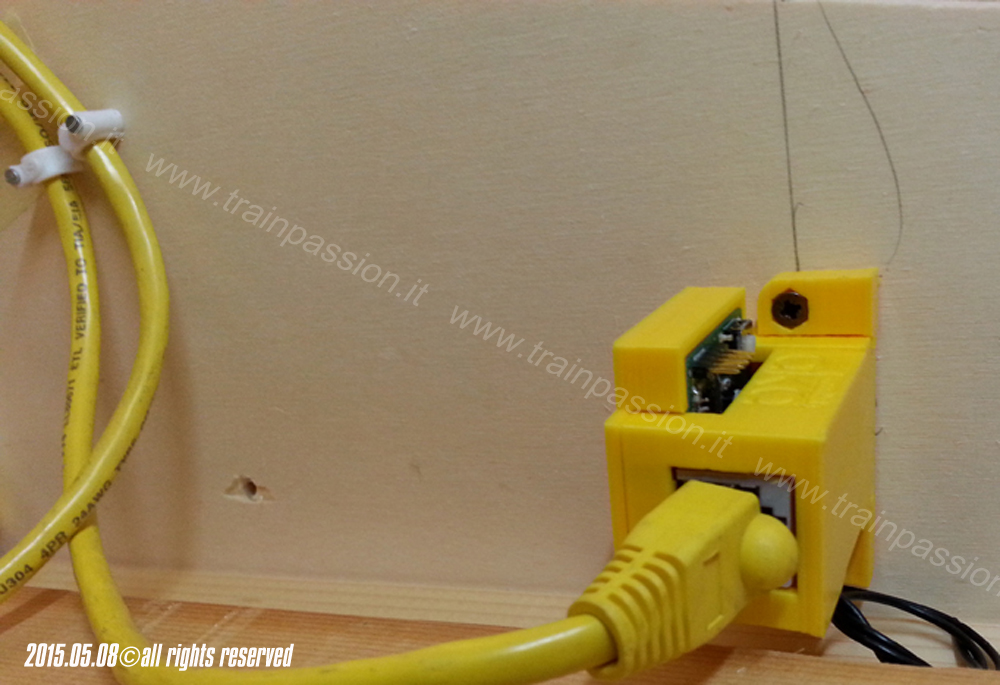
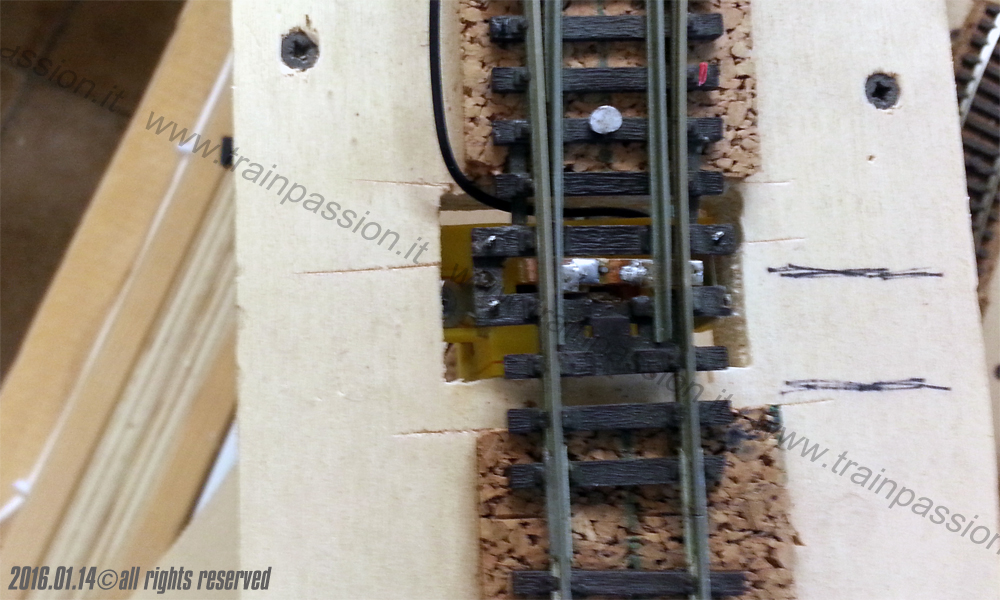
Dicevamo prima che l’intervento sembrava essere agevole, ma purtroppo le traverse mobili dei deviatoi risultano posizionate in corrispondenza dei montanti del modulo…Non potevamo essere più precisi…Non c’è effettivamente spazio per un montaggio sotto-plancia, ma poco male; è sufficiente rimuovere i perni di azionamento dei motori (ad incastro sul glifo del servo lineare), fissare lateralmente le scatole (i deviatoi non saranno visibili) e connettere la traversa mobile e il glifo del servo con una asticella di acciaio tagliata a misura.

Ripetiamo l’operazione per il secondo servo e colleghiamo i fili di polarizzazione del cuore ai morsetti.

Per completare l’operazione non rimane che sostituire il motore Peco nel deviatoio che collega la bretella da un lato alla rampa della costruenda linea e dall’altro alla racchetta di inversione. Il kit AKA fornisce un apposito adattatore da avvitare alla scatole. E’ sufficiente rimuovere il motore Peco e installare quello AKA.

Il montaggio è banale; si inseriscono i perni dell’adattatore nelle asole del deviatoio, si ruotano leggermente le parti che affiorano e il motore è fissato al deviatoio.
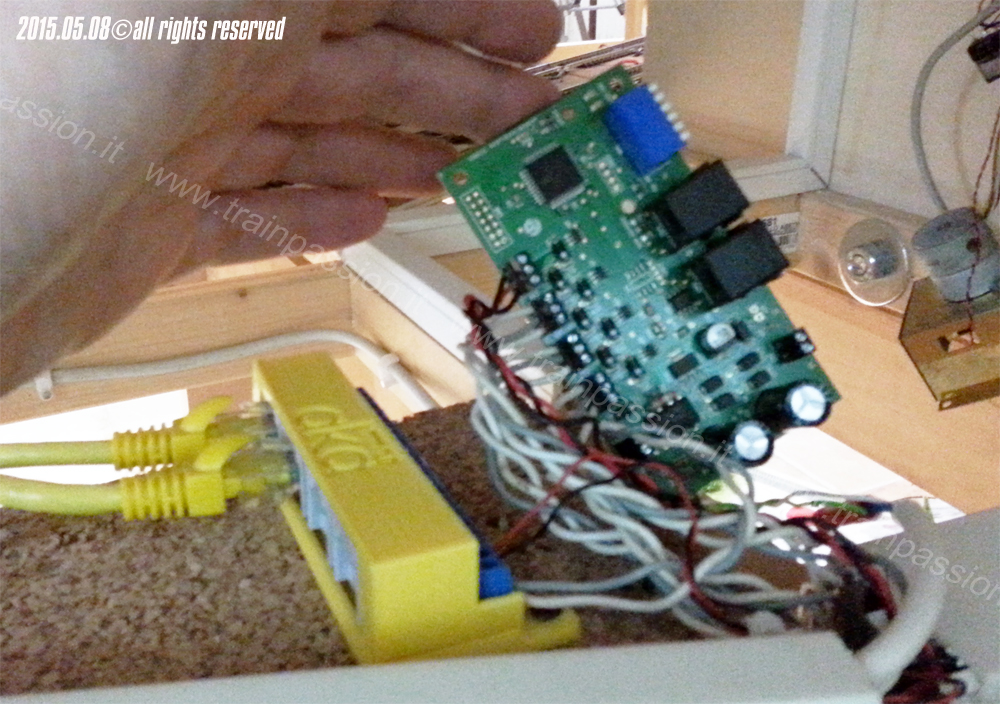
Colleghiamo tutti i motori al controller con i cavi in dotazione; un lavoro pulito, semplice e soprattutto rapido.

Non rimane che programmare l’indirizzo primario per il funzionamento in DCC. Il controller AKA offre tre diverse modalità di impostazione; noi scegliamo quella tradizionale, impostiamo il primo indirizzo e gli altri tre saranno sequenziali. Per la programmazione e sufficiente portarsi sulla funzione desiderate, nel nostro caso la n° 2, pigiando il tasto di programmazione, quindi due volte; teniamo premuto per due secondi e il led di controllo inizia a lampeggiare. Impostiamo l’indirizzo sulla centrale come da norme NMRA e il led si spegne. Il controller è programmato. La velocità di spostamento degli aghi di default è abbastanza rapida, preferiamo lasciarla così, i deviatoi non sono a vista e la rapidità di esecuzione ci garantisce più sicurezza con gli itinerari di Traincontroller . Dobbiamo lavorare un po’ sulla corsa, che risulta troppo ampia. Non è una operazione difficile: si scegli prima quale motore programmare, agendo sul tasto 1 (selettore dei motori). Il led di controllo lampeggia da 1 a 4 volte, a seconda del motore selezionato, quindi ci portiamo sulla funzione 8, la attiviamo tenendo premuto il pulsante per due secondi. Ad ogni pressione sul pulsante si diminuisce la corsa. Il controller ci offre tre possibilità, quella intermedia è perfetta per la nostra installazione.
Il lavoro è terminato e possiamo ora definire nuovi itinerari per i nostri treni.
Abbiamo riassunto l’operazione descritta in un breve video, in modo da mostrare anche il funzionamento dei motori e il successo del lavoro…i treni continuano a girare senza deragliamenti!!